Machine builders are increasingly demanding machines with higher hygienic standards to withstand aggressive liquids and foam cleaners.
To complement the introduction of the stainless steel motor to the LinMot product range, the matching guide is now available. Together with the stainless steel motors with high protection class IP69K, this complete system is suitable for direct use even under difficult ambient conditions. The stainless steel system is designed optimally to handle the use of aggressive liquids and foam cleaners, which are common in the pharmaceutical or food industry.
The guide consists of two guide blocks, two guide shafts, and a load-mounting plate, all made from rustproof steel (mat. no. 1.4404, AISI 316 L). The precise linear motion is provided by hardened shafts supported in plastic sliding bearings. The bearing material is specially designed for use in food products and medical applications and is certified to FDA standards.
The design is characterized by its conveniently rounded surfaces, which make it easier to clean. A channel in the guide blocks also makes the slider completely flushable. The guide has a maximum stroke length of 510 mm. Together with the stainless steel motors, motions with an acceleration of up to 440 m/s² can be achieved.
With a robot that can handle tennis balls, tissue packs and champagne glasses, what more do we need for Wimbledon (apart from weather)?
The new robot gripper arm from Keller HCW eliminates pneumatics with the use of linear motors, so reducing operating costs and protecting the environment. (Image source: Keller HCW)
By changing from pneumatic cylinders to linear motors, German machine builder Keller HCW has developed a universally deployable robot gripper with a high payload rating that can safely pick up hollow bricks, glasses, cat food packages, tiles, tissue packs and tennis balls with just the right amount of force. Benefits included improvements in precision, repeatability, maintenance and energy efficiency in addition to negating the need for multiple grippers and lost changeover time.
Keller HCW, who is one of the world’s leading manufacturers of machinery and plant for the heavy clay industry, also develops customised robotic solutions with over 500 robot installations. Robot grippers from Keller HCW (mainly pneumatic drives) have proven themselves for years in brickyards and other heavy ceramics operations. However, there were significant disadvantages of using pneumatic cylinders when different shapes and formats of bricks are run on the same line so alternative designs were investigated.
For example, they are used to grip unfired bricks (blanks) and to place them with a certain spacing that guarantees an optimal drying and firing process. The bricks are fed to the gripper on a continuously running transport belt in the form of a consolidated stack consisting of about 20 to 30 blanks. The gripper picks up the entire stack, spaces the individual bricks optimally while the robot is moving, and then places them as a group on special carriers or transport belts.
“The challenge here is that the strength of the blanks can vary, and therefore we can only apply a limited gripping force at a limited approach speed. There is also a limited time window available during which the bricks have to be picked up from the feeder belt as it continues to move,” explains Reinhold Ungruhe, the manager of Automation and Electrical Engineering at Keller HCW GmbH.
Up to now, the robot grippers that have been used for singulating bricks, as well as other handling process in the heavy ceramics industry, have mainly used pneumatic drives.
Stroke adjustments were previously limited to 10 mm by the pneumatics
Due to the limited stroke and the relatively slow speed of the pneumatic cylinders, the stroke adjustments had to be no greater than 10 mm. This is disadvantageous if different shapes and formats of bricks are run on the same line, which is increasingly the case.
In developed industrial countries today, it is typical that the few thousand bricks required for the roof of a house, including the special bricks (such as gable and ridge tiles), are produced for a specific customer in one batch on the same line.
In practice, this has meant that the brickyards have had to procure several grippers for each robot—typically 6-axis robots—and use them alternately in order to cover all of the formats and styles. With procurement costs of about 50,000 Euro per gripper, this can tie up a great deal of the company’s capital. An alternative possibility for the user is to procure just one gripper per robot and then to reconfigure it whenever a format or style change requires it. In order to minimize this time-consuming setup process for the user, Keller has come up with a hybrid gripper design. The pneumatically powered grippers can be adjusted by means of a rotary servo drive in order to be able to group more brick formats and styles using the same gripper.
Pneumatic adjustments require manual finesse
“In practice, however, it is very difficult to adjust the pneumatics,” says Reinhold Ungruhe. “Just the fact that the pneumatic actuators behave differently depending on the ambient temperature, and therefore the precise adjustment of the gripping point and the grip force is only partially possible.”
The condensate water and other contaminants in the compressed air are another factor. Pneumatic cylinders are also not maintenance-free. They need to be oiled, for example. Seals harden or leak, especially when the drive works at a high frequency, so that the entire cylinder needs to be replaced.
Keller therefore took a step further and developed a completely electrically powered demonstration gripper that does not have these disadvantages. Twelve linear motors, model PS01-37Sx120-HP-N from LinMot*, move the gripper jaws that are mounted directly on them. They have a maximum stroke of 120 mm, a maximum force of 122 N, and an especially compact form factor.
High dynamics and repeatability with linear motors
“Linear motors can be controlled more precisely and are more dynamically than pneumatic drives. They can also cover a much longer stroke in a short time,” says the Keller specialist for automation and electrical engineering, summarizing the advantages.
The pattern in which the bricks are placed can be entered at the system’s user interface and changed at the push of a button. No time-consuming gripper change or setup is required. Unlike with pneumatic drives, the grip force can also be controlled directly. This ability and the long stroke, combined with high dynamics, are what make this gripper so universally deployable and why it can handle sensitive products, such as glasses or cardboard packages, as safely as robust products.
The linear motors in the new gripper are actuated by 12 ProfiNet servo controllers from LinMot’s C1100 series. These have been specially designed for applications where pneumatic cylinders are replaced by linear motors. The controllers are very compact and lightweight, with a height of 146 mm, width of 26.6 mm, and depth of 106 mm.
“This is important for the payload capacity of the gripper, because we wanted to mount the controller directly on the gripper, in order to keep to a minimum the number of cables running along the robot,” explains Reinhold Ungruhe.
The disadvantage of the additional weight, however, is typically more than made up for by eliminating valve banks, mechanical components, and sensors that used to be required, as well as by the greater flexibility and repeatability of the electric drives.
“For this series, it would also make sense to use LinMot multi-axis modules or distributed motors with integrated drive electronics to further reduce the weight and space required,” adds the automation expert.
Environmentally friendly and economical
In developed countries, users also focus on another consideration of the direct electric drives: their frugal use of energy.
“More and more manufacturers of heavy ceramics products are discovering energy efficiency in their production facilities as a differentiator and image factor that drives sales,” reports Reinhold Ungruhe.
Compressed air does not fit this image, because after all it is one of the least efficient and therefore most expensive energy media. Only about 5% of the energy applied is available as useful power at the actuator. For fast cylinders, in particular, the high noise level is an indication that a lot of energy quite literally disappears into thin air. The higher procurement costs for an electric drive are quickly paid back. Even using conservative figures, its efficiency of about 97% means that it amortizes within a maximum of three years.
No wonder, then, that more and more companies are attempting to eliminate compressed air entirely in their production facilities. Keller recently built a system for packing hollow concrete blocks with rock wool with no pneumatics at all.
“The great interest that this gripper drew at the Automatica in Munich confirms our assessment that many other industries beyond the field of heavy ceramics will also follow this trend, and are looking for flexible, reliable gripping and singulating solutions based on linear motors,” says Reinhold Ungruhe, optimistically looking to the near future.
This post is taken from an article written by Franz Joachim Rossmann, technical journalist, Gauting.
Linear motors mimic the heart in testing of artificial cardiovascular devices
Linear motors are used in increasingly diverse applications and much of the pioneering work is being done in our universities. This is the first in a series of posts that looks at some of the more interesting and promising applications and starts by looking at the work of Queen Mary University of London who are using linear motors to simulate the human cardiovascular system. Heart disease is the most common cause of death globally and this important research will help in the development of treatments by allowing reliable in vitro (outside the body) testing of artificial heart devices.
Dr Paula Ruiz-Hincapie (Queen Mary University of London), Professor Theodosios Korakianitis (Saint Louis University) and their collaborators have designed a device which simulates the human cardiovascular system and significantly improves on previous implementations so allowing reliable in vitro testing of artificial devices such as heart valves, ventricular assist devices (VADs) and mechanical circulatory support (MCS) devices. Artificial devices need to be tested in vitro prior to in vivo testing and this work improves the reliability of testing so allowing development and introduction of new medical devices.
“This work by, funded by the NHS, has now moved from testing and proof of concept to the development of new medical devices for implantation,” adds Paula.
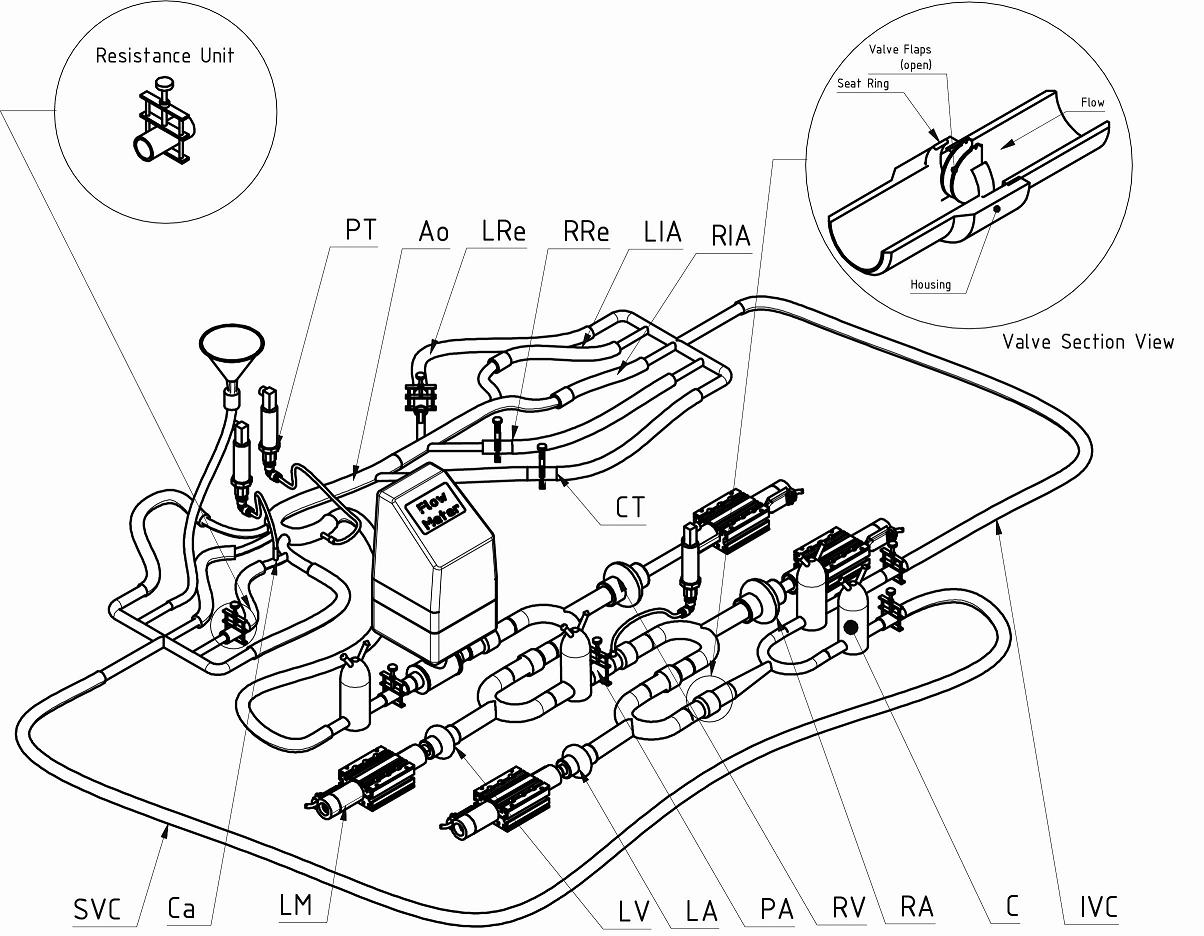
Unsurprisingly, simulation of the cardiovascular system is a complicated and challenging task requiring simulation of in vitro flow rates, pressures and other parameters representing normal and diseased conditions of the human cardiovascular system. Such devices are sometimes called bioreactors or ‘mock’ simulators of cardiovascular loops (SCVLs). Most SCVLs only simulate the systemic circulation (the circulation of the blood to all parts of the body except the lungs) and have other limitations such as capturing accurately the pressure waveform. Paula Ruiz, Theodosios Korakianitis and their collaborators from Shiraz University of Technology, Barts and the London NHS Trust have designed and implemented a mechanical cardiovascular system using linear motors which models all four chambers of the heart and the systemic and pulmonary circulation loops. Systemic circulation is the part of the cardiovascular system which carries oxygenated blood away from the heart to the body, and returns deoxygenated blood back to the heart. Pulmonary circulation is the portion of the cardiovascular system which carries deoxygenated blood away from the heart, to the lungs, and returns oxygenated (oxygen-rich) blood back to the heart.
Diagrammatic representation of the SCVL. Ao: aorta artery; C: compliance; Ca: carotid artery; CT: celiac trunk; IVC: inferior vena cava; LA: left atrium; LM: linear motor; LV: left ventricle; PA: pulmonary artery; PT: pressure transducer; RA: right atrium; Re: renal artery; RV: right ventricle; SVC: superior vena cava.
Four rubber gaiters of the correct size are used to model the four chambers of the heart which are accurately activated by a separate linear motor (P01-37×120 from LinMot) to simulate the suction and ejection stages. The linear motors consist of a stator and a slider accurately controlled by an E300 LinMot controller with four channels to accurately the position of each slider according to a predefined time-varying elastance function. This allows precise emulation of the contraction and filling phases as found in the native cardiac muscle. A high speed, high performance data acquisition card from National Instrument is used to send the desired displacement trajectories from the PC to the linear motor controller and to read the measurement signals from the pressure transducers and the flow-meter to the PC. NI LabView software is used for the desired trajectory generation and monitoring tasks.
This research demonstrated that the use of linear motors for displacing individual chambers provides an accurate technique for emulating different physiological (rest and exercise) and pathological conditions of the human cardiovascular system with and without mechanical circulatory support. The experimental results demonstrated the capability of this device to replicate normal and diseased conditions. The details of the experimental simulation of the various conditions and the measurements recorded to assess the success of the simulation are published in Artificial Organs, 2013 Vol 37 No 6 p 549-560.
Paula Ruiz-Hincapie is now affiliated to the University of Hertfordshire where her work has expanded into an exciting new area. Applying her experience of simulating the cardio vascular system with linear motors, she intends to use these motors to stimulate cardiovascular cells to reproduce themselves. The intention is to populate a bespoke geometry or scaffolding that can then be transferred to a patient for replacement of a malfunctioning organ or tissue.
“The cells will be grown in the laboratory and supplied with oxygen and nutrients. Linear motors will used to apply a force profile simulating that of the cardiovascular system. We hope, one day, to use cells grown in this way to implant into diseased hearts replacing damaged tissue. To do this type of transplant today tissues would be taken from a washed and sterilised cadaver, but there is always a risk of infection or rejection by the recipient’s immune system. Our work hopes to overcome these issues by growing replacement cells from cells taken from the recipient and thereby overcoming these problems,” Paula continues.
We look forward to hearing more about this innovative work in the future and wish Paula the very best with her research.
To learn more about LinMot’s range of linear motors please take a look at our website or contact us to discuss your application.
In Vitro Cardiovascular System Emulator (Bioreactor) for the Simulation of Normal and Diseased Conditions With and Without Mechanical Circulatory Support
*Paula Ruiz, *Mohammad Amin Rezaienia, ‡Akbar Rahideh, †Thomas R. Keeble,
†Martin T. Rothman, and §Theodosios Korakianitis
*School of Engineering and Materials Science, Queen Mary University of London; ‡Shiraz University of Technology, School of Electrical and Electronic Engineering, Shiraz, Iran; †Department of Cardiology, Barts and the London NHS Trust, London Chest Hospital, London, UK; and §Parks College of Engineering,Aviation and Technology, Saint Louis University, St. Louis, MO, USA
Linear motors with ATEX and IECEx certification are now available for use in hazardous locations and explosive atmospheres. These motors are required wherever flammable liquids, vapours, gases or flammable dust occur, for example in printing machines, plastic-processing machines and in the chemical or pharmaceutical industries.
LinMot series P01-48 motors are now certified as EX-protected motors in accordance with Directive 94/9/EC as of October 2015. Device classifications 2G and 2D mean that the devices can be used in an explosive atmosphere consisting of gases, vapours, mist or dust.
The motors are designed to be very compact and do not have unnecessary edges, corners, holes, and threaded connections. This avoids locations where explosive material can collect and minimises the risk of a potential ignition source due to uneven heating. Completely encapsulated in stainless steel, they do not need any seals. All joint connections are welded. To completely seal off the motor, the windings and other internal components of the stator are potted in epoxy resin. This guarantees optimal protection of the motor and eliminates the risk of electrical arcing.
Please contact us to find out more or read the ATEX and IECEx linear motor datasheet from LinMot. More information about linear motors from LinMot can be found in our product pages.
Last month, scientists found bacteria resistant to the drug (colistin) which is used when all others drugs have failed and warn that this could mark the beginning of a post antibiotic era with people dying from untreatable infections. It is likely that resistance emerged after colistin was overused in farm animals.
Preventive medications, including antbiotics are widely used in farming and aquaculture. Norway, where fish is the third most important export has recently succeeded in nearly completely eliminating antibiotics. At their peak, in 1987, Norwegian fisheries alone used about 50 tonnes of antibiotics per year – more than were prescribed for the entire population of Norway in the same time period. Now, Norwegian fish farms are using less than 100 kg per year and 98% of all salmon farmed in the country have absolutely no exposure to antibiotics. This was made possible by vaccinating the fish.
This procedure is difficult, however, because up to now each fish has had to be manually injected with the vaccine using a syringe. Considering the number of fish raised annually – 1.4 million tons of salmon in aquaculture worldwide in 2010 – this procedure had reached its limits. Drives and Controls have reported on the automation of the vaccination process by a Norwegian machine builder, Skala Maskon, whose system allows a single operator to anaesthetise, sort, singulate and vaccinate up to 20,000 fish every hour. The machine not only vaccinates many more fish but also ensures that the quality of the vaccinations is much higher than humans can achieve.
The machine consists of one or two vaccination modules, each equipped with four vaccination stations. An image processing system first measures each fish and generates information that is used to calculate the point of injection. The vaccination station is then positioned using a linear motor, making it possible to hit the optimal oinjection site for each fish with a precision of better than 98%. The length of the fish, as determined by the image procesing system, is also used to calculate the depth of the injection. A sensor on the needle monitors the injection process and the vaccine dosage for each fish. As a result, the mortality is said to be less than 0.02%.
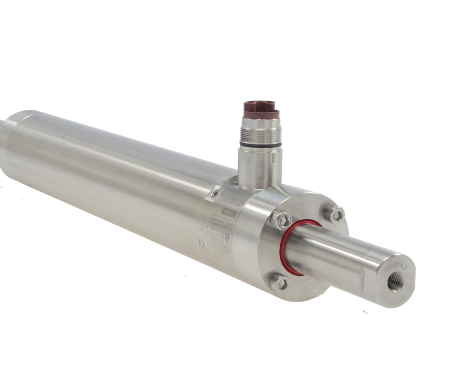
LinMot linear motors were chosen for their speed, precision, compact form and their ability to meet the necessary hygiene requirements. The motors are made of stainless steel and protected to IP69K, contain no gaskets and all the connections are welded. The motors are potted to prevent condensation and they have no protruding parts or gearboxes (unlike conventional servomotors).
Solution Details
The stator model, PS01-37x120F-HP-SSC-R used in the vaccination unit, has an outer diameter of 48 mm and length of 296 mm and when used together with the appropriate slider is able to apply a constant force of up to 210 N over the entire range of its stroke. A high-clearance variant, PL01-19×350/260, with a stroke of 120 mm was selected for the vaccination unit. The motor is controlled by a model E1100-VF-HC servo inverter, also from LinMot, which supports both force control and speed control and is designed for integrating the linear motors into systems with a master axis controller.
The motor’s force or speed is set by the master position controller via a ±10V differential analogue signal. Either the internal LinMot measurement system built into the motor or a high-precision external measurement system can be used for feedback. Simple positioning controls can actuate the E1100-VF controller with stepper motor or directional pulse signals. For testing and commissioning, the VF controller can also be operated in point-to-point mode, with four freely programmable end positions.
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptRead More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are as essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may have an effect on your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.
 118 977 1077")
 The guide consists of two guide blocks, two guide shafts, and a load-mounting plate, all made from rustproof steel (mat. no. 1.4404, AISI 316 L). The precise linear motion is provided by hardened shafts supported in plastic sliding bearings. The bearing material is specially designed for use in food products and medical applications and is certified to FDA standards.
The guide consists of two guide blocks, two guide shafts, and a load-mounting plate, all made from rustproof steel (mat. no. 1.4404, AISI 316 L). The precise linear motion is provided by hardened shafts supported in plastic sliding bearings. The bearing material is specially designed for use in food products and medical applications and is certified to FDA standards.